Grating Light Valve (GLV®)
High Performance in One Dimension
The Grating Light Valve (GLV®) is a high-performance spatial light modulator comprising a linear array of thousands of micro-ribbons anchored on the surface of a silicon chip.
By electronically controlling the deflection of the ribbons, the GLV® functions as a programmable diffraction grating, enabling attenuation, modulation and switching of laser light with unparalleled resolution, speed and power-handling.
Principle
Grayscale amplitude from phase modulation
The GLV® creates images by exploiting the wave-nature of light. Shaped laser light illuminates the center of the ribbon array. Light reflected from movable active ribbons interferes coherently with light reflected from adjacent identical static reference ribbons. If the active and static mirrors are co-planar, the phase difference between reflected waves is zero (φ=0), and light is reflected like an ordinary mirror. However, if the active ribbons are electronically displaced by quarter-wave relative to the static ribbons, the reflected waves are anti-phase (φ=π), and the specular beam is extinguished as light is scattered into fixed diffraction angles.
A key advantage of the Grating Light Valve (GLV®) is its inherent analog grayscale. For intermediate phase relationships between the static and active mirrors (i.e. 0<φ<π) the light distribution between reflected and diffracted beams varies continuously. Thus by carefully controlling the active mirror displacement, true analog grayscale is achieved. Other spatial light modulators rely on pulse-width-modulation for grayscale. However, this comes at great cost to modulation rate. The “built-in” grayscale of the Grating Light Valve (GLV®) allows deep intensity resolution with zero speed penalty.
The Grating Light Valve (GLV®) acts as a variable phase diffraction grating.
Advantages
Painting with Light
High Power Handling
The robust materials comprising the GLV® endows it with unparalleled power handling capability. GLV®s have been used for years in harsh industrial applications with incident powers of 80W per device at power densities as high as 10kW/cm2.
Non-contact, High Reliability
Unlike other MEMS spatial light modulators, the PLV™ is a non-contact device and requires no lubricants inside the package. This attribute is particularly valuable in high-fluence UV applications.
High Speed
Due to the low mass, high tension and short stroke, GLV® micro-ribbons can switch in less than 300ns. This is 10x faster than MEMS tilt mirrors and 1000x faster than liquid crystal spatial light modulators. Our GLV® modules support refresh rates between 250 to 500 kHz.
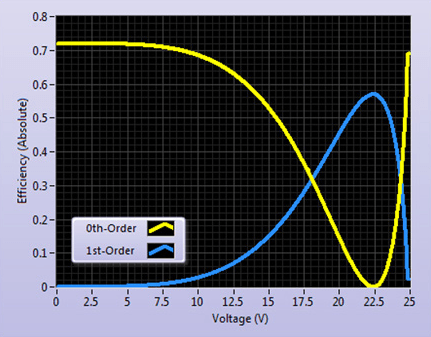
GLV® Intensity-Voltage Response
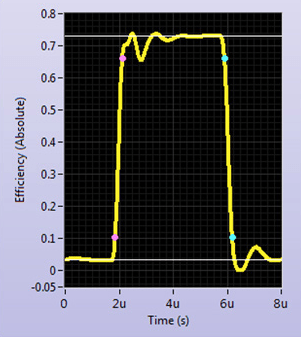
GLV® Pulse Response
(4μs duration)
Borderless Pixels
Unlike other MEMS spatial light modulators, both the ribbon and piston phase modulator are non-contact devices and require no lubricants inside the package. This attribute has proven to be a significant form of reliability, especially in high-fluence UV applications.
Variations
The Right Light Valve for Your Application
GLV® modules incorporate unique pixel designs to achieve different optical properties. The F1088 modules use a “flat” light valve design in which active and bias ribbons are structurally identical. This style of GLV® is wavelength-agnostic and delivers the highest contrast in first-order imaging. GLV® design is used in the G1088 and G8192 modules. This “true-GLV®” replaces the bias ribbons with metallized regions on a substrate. This design offers the advantage of improved efficiency and contrast in zeroth-order imaging, but has a wavelength dependent voltage-intensity response.
A = Active Ribbon B = Bias Ribbon
Flat Light Valve
Grating Light Valve
Resources
Further information and application notes
8192-Channel Grating Light Valve for Ultra-Violet Direct Write Lithography
A white paper on the development of a new 8192-channel GLV® spatial light modulator designed for high-resolution ultra-violet direct imaging (UVDI) applications.
Application of GLV Technology in Optical Communications
A technology brief on how Grating Light Valve (GLV®) technology is used to create breakthrough components like switches and attenuators for optical communication networks.
Controlling the Grating Light Valve™ in Real-Time Applications
Technical discussion on the methods and systems for controlling GLV®, PLV™, and DPM™ devices in applications that require real-time adjustments and feedback.
Dynamic Gain Equalizer Presentation
A presentation outlining the principle of operation and benefits of using the GLV® device as a Dynamic Gain Equalizer (DGE) for managing DWDM channels in optical networks.
Enabling high data-rate imaging applications with Grating Light Valve™ technology
A discussion on the design trade-offs and optimizations required to use GLV® technology in high data-rate imaging applications like lithography and high-performance displays.
GLV-Based Solar Simulator
Describes a high-concentration, spectrally programmable solar simulator using a super-continuum laser and GLV® technology to accurately test multi-junction concentrator photovoltaics.
Grating Light Valve and Vehicle Displays
Discusses the application of the Grating Light Valve (GLV®) technology in automotive systems, particularly for creating robust and low-cost Head-Up Displays (HUDs).
Grating Light Valve Technology Brief
A promotional and technical brochure from Silicon Light Machines detailing the advantages and applications of its Grating Light Valve (GLV®) technology.
Grating Light Valve™ Technology: Update and Novel Applications
An invited paper providing an overview of the GLV® device, its theory of operation, optical performance, and its various applications in digital imaging and displays.